CA Controls Implementation#
- In the current CA : We are using the following states and the trajectory goes on without stopping (straight line).
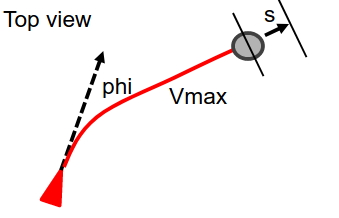
- Flight path angle (Heading $\phi$)
- Speed (Velocity)
- In the new CA implementation : We will use following states.
- Heading ($\phi$)
- Flight path angle ($\gamma$)
- Position deviation from way point to stop at (s)
- The max speed set for the flight plan ($v_{max}$)
Summary : Using a one waypoint flight plan and position (x, y, z) and max speed.

Top Level Implementation of New CA#
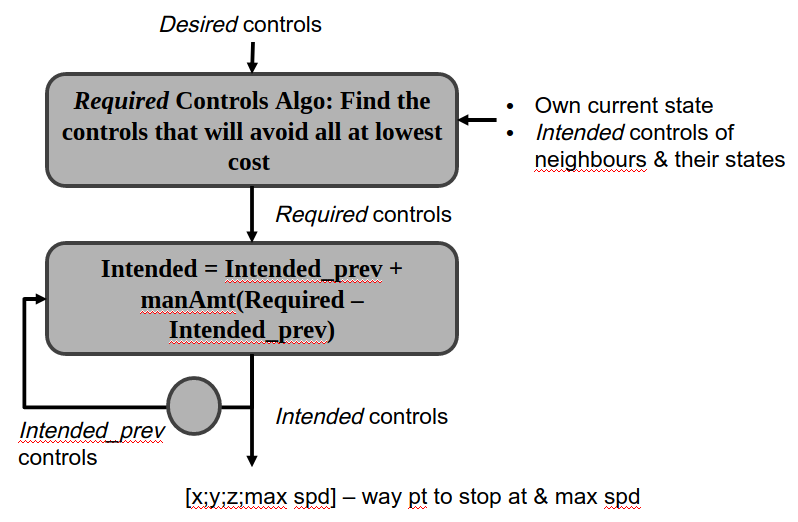
Required Controls & Implementation Steps#
Step 1: Forward simulate trajectories of own UAV using Desired controls and other UAVs using their Intended controls
Step 2: If there is collision, perturb own UAV’s controls separately and evaluate cost for each perturbation
Step 3: Update controls along gradient with steepest descent in cost & repeat the above steps until there is no collision
Step 4: If there is a solution, output it. If there is no solution, command the UAV to stop immediately
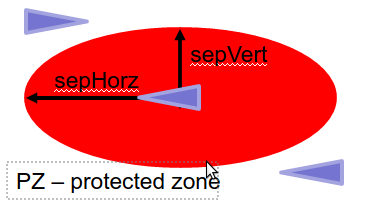
Parameters#
- Separation required : 1. sepHorz 2. sepVert
- Maneuver amount : manAmt = ½ (default)
Cost Factors (Desired Controls)#
Deviation from Desired controls formulation :
$\phi{c} \phi^2 \gamma{c} \gamma^2 + v{c} + (v{max} - v{max,desired})^2 + s{c} s^2$#
- where $\phi{c}$, $\gamma{c}$, $v{c}$, $s{c}$ are weights that need to be chosen such that the result is consistent with what is desired, we can plot a graph of iso-cost lines to visualize and check.
Cost Factors (Rules)#
- Deviation from passing rules (Passing on the Right Side)
| Crossing | Head On | Overtaking |
|---|---|---|
 |  |  |
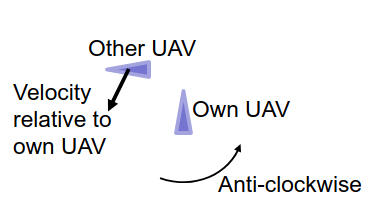
- What do we have to check?
- Consider CPA (Closest Point of Approach)
- At CPA, look at velocity of other UAV relative to own UAV
- It should be anti-clockwise around own UAV if own UAV is passing on the right of other UAV
Cost Factors (Collision)#
- Distance at CPA
- The smaller the distance, the higher the cost
- Moderate cost with time to reaching CPA (collision), the later the collision, the less the weight