Verify Calibration by Triangulation#
by triangulation
@jalvin
Verify the camera calibration by checking the depth of different points in the images. Ensure that you have the yaml calibration file ready and take a few photos with the cameras.
Git Repository: https://github.com/STEMO-CS5340/position_proposal_estimator
Clone and Build
git clone (source link)# go to cloned directorygit submodule update --init --recursivemkdir buildcd buildcmake ..Usage
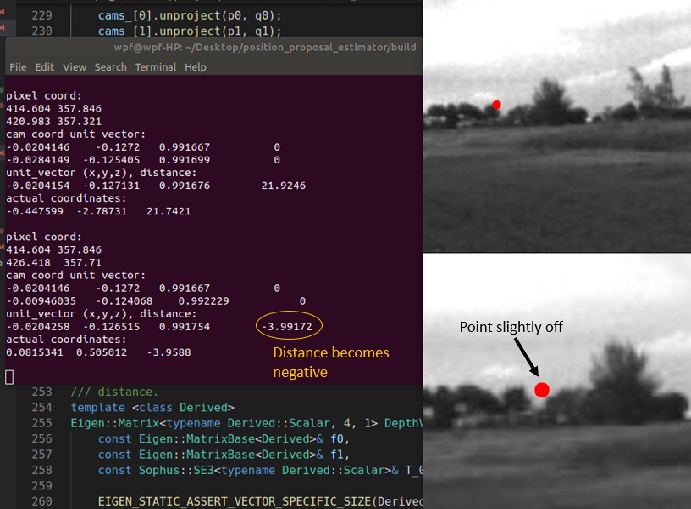
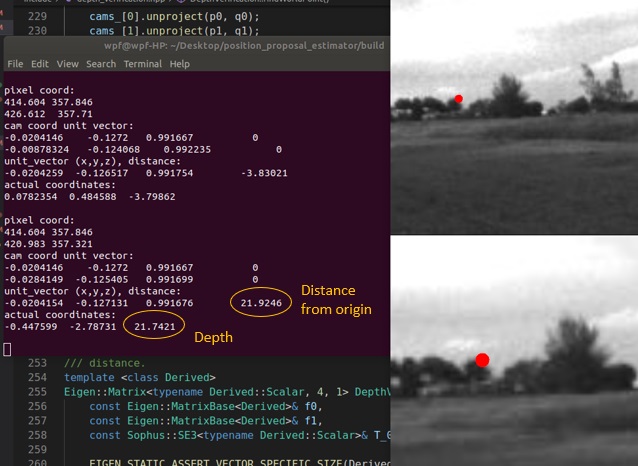
# open file src/depth_verification_test.cpp# set imageFileNames and yaml file# go to build directorymake ./depth_verification_testClick on the same point in both images. Terminal will display the direction unit vertor and the distance between the point and origin, and also displays the world coordinates of the point in the next line. Verify that the distance is correct.
Take note
Try to click on the point as precisely as possible. The algorithm is sensitive to slight changes, so selecting the point slightly off can give unexpected result.